SPI 开发指导_Rev1.0
修订记录
版本 |
日期 |
作者 |
修订内容 |
|---|---|---|---|
Rev1.0 |
23-09-11 |
TL |
创建文档 |
Rev1.1 |
24-03-25 |
SXX |
更改文档名称 |
Rev1.2 |
25-01-14 |
YMX |
1. 增加不同模组支持SPI参考引脚复用表说明 2. 取消所有函数链接,解决钉钉链接飞书问题 3. 删除最后章节完整代码,示例代码以SDK为准 |
Rev1.3 |
25-04-18 |
张浩 |
增加系列常见问题 |
Rev1.4 |
26-04-22 |
ZXQ |
根据审核修改 |
1 简介
1.1 文档简介
本文档介绍 LTE-EC71X SPI 接口 API 情况, API 接口位于 :
LSDK/components/kernel/lierda_api/liot_spi/liot_spi.h 文件声明。
LTE-EC71X 系列模组支持最多 2 路 SPI,不同模组支持的SPI需参考对应的《引脚复用表》。
请至钉钉文档查看附件《Lierda NT26-FCN OpenCPU 引脚复用表.xlsx》。
请至钉钉文档查看附件《Lierda NT26-KCN OpenCPU 引脚复用表.xlsx》。
1.2 SPI 总线原理简介
串行外设接口(Serial Peripheral Interface,SPI)是一种同步串行通信接口,用于在微控制器和外围设备之间进行全双工、高速数据传输。
LTE-EC71X系列模组支持最多2路SPI总线(SPI0和SPI1),每路SPI支持以下功能特性:
主要功能特性:
全双工同步通信:支持同时发送和接收数据
主从模式:支持主从模式操作
多从机支持:每路SPI最多支持2个片选(CS0、CS1)
可配置时钟频率:支持812.5KHz、1.625MHz、3.25MHz、6.5MHz、13MHz多种时钟频率
灵活的数据帧格式:数据帧大小可配置(4~16位,默认8位)
多种传输模式:支持轮询、中断和DMA传输方式
可配置时钟极性和相位:支持4种SPI工作模式(CPOL/CPHA组合)
MSB优先传输:数据始终以最高有效位(MSB)优先的方式传输
通信接口:
MOSI:主设备输出,从设备输入
MISO:主设备输入,从设备输出
SCLK:串行时钟,由主设备产生
CS:片选信号,低电平有效(可配置)
2 API 函数概览
函数 |
说明 |
|---|---|
|
该函数用于初始化 SPI |
|
该函数用于初始化 SPI(配置 SPI 总线参数) |
|
该函数用于设置通过 SPI 同时发送和接收数据 |
|
该函数用于设置通过 SPI 接收数据 |
|
该函数用于设置通过 SPI 发送数据 |
|
该函数用于释放 SPI 总线 |
3 类型说明
3.1 liot_errcode_spi_e
SPI API 执行结果错误码。
定义
typedef enum
{
LIOT_SPI_SET_CB_ERR = -1,
LIOT_SPI_SUCCESS = 0,
LIOT_SPI_ERROR = 1 | (LIOT_COMPONENT_BSP_SPI << 16), // SPI总线其他错误
LIOT_SPI_PARAM_TYPE_ERROR, //参数类型错误
LIOT_SPI_PARAM_DATA_ERROR, //参数数据错误
LIOT_SPI_PARAM_ACQUIRE_ERROR, //参数无法获取
LIOT_SPI_PARAM_NULL_ERROR, //参数NULL错误
LIOT_SPI_DEV_NOT_ACQUIRE_ERROR, //无法获取SPI总线
LIOT_SPI_PARAM_LENGTH_ERROR, //参数长度错误
LIOT_SPI_MALLOC_MEM_ERROR, //申请内存错误
LIOT_SPI_ADDR_ALIGNED_ERROR, //地址不是4字节对齐
LIOT_SPI_MUTEX_CREATE_ERROR, //互斥锁创建失败报错
LIOT_SPI_MUTEX_LOCK_ERROR, //互斥锁上锁超时报错
LIOT_SPI_UNKNOWN_ERROR,
} liot_errcode_spi_e;
参数
LIOT_SPI_SET_CB_ERR:设置回调失败。LIOT_SPI_SUCCESS:函数执行成功。LIOT_SPI_ERROR:函数执行失败。LIOT_SPI_PARAM_TYPE_ERROR:参数类型错误。LIOT_SPI_PARAM_DATA_ERROR:参数数据错误。LIOT_SPI_PARAM_ACQUIRE_ERROR:参数无法获取。LIOT_SPI_PARAM_NULL_ERROR:指针参数为 NULL。LIOT_SPI_DEV_NOT_ACQUIRE_ERROR:无法获取 SPI 总线。LIOT_SPI_PARAM_LENGTH_ERROR:参数长度错误。LIOT_SPI_MALLOC_MEM_ERROR:申请内存错误。LIOT_SPI_ADDR_ALIGNED_ERROR:地址不是 4 字节对齐(通常在DMA传输模式下会出现此错误)LIOT_SPI_MUTEX_CREATE_ERROR:互斥锁创建失败报错。LIOT_SPI_MUTEX_LOCK_ERROR:互斥锁上锁超时报错。LIOT_SPI_UNKNOWN_ERROR:未知错误。
3.2 liot_spi_config_s
SPI 总线参数配置结构体定义如下:
定义
typedef struct{
liot_spi_input_mode_e input_mode;
liot_spi_port_e port;
unsigned int framesize;
liot_spi_clk_e spiclk;
liot_spi_cs_pol_e cs_polarity0;
liot_spi_cs_pol_e cs_polarity1;
liot_spi_cpol_pol_e cpol;
liot_spi_cpha_pol_e cpha;
liot_spi_input_sel_e input_sel;
liot_spi_transfer_mode_e transmode;
liot_spi_cs_sel_e cs;
liot_spi_clk_delay_e clk_delay;
liot_spi_device_mode_e device_mode;
liot_spi_data_msb_lsb_e data_msb_lsb;
liot_spi_irq_callback irq_callback;
} liot_spi_config_s;
参数
类型 |
参数 |
描述 |
|---|---|---|
liot_spi_input_mode_e |
input_mode |
SPI 输入功能 |
liot_spi_port_e |
port |
SPI 总线编号,仅支持LIOT_SPI_PORT0和LIOT_SPI_PORT1 |
unsigned int |
framesize |
数据帧大小。范围:4~16;默认值:8;单位:bit |
liot_spi_clk_e |
spiclk |
SPI 时钟频率 |
liot_spi_cs_pol_e |
cs_polarity0 |
CS0 引脚电平 |
liot_spi_cs_pol_e |
cs_polarity1 |
CS1 引脚电平 |
liot_spi_cpol_pol_e |
cpol |
时钟极性 |
liot_spi_cpha_pol_e |
cpha |
时钟相位 |
liot_spi_input_sel_e |
input_sel |
数据输入引脚 |
liot_spi_transfer_mode_e |
transmode |
SPI 传输模式 |
liot_spi_cs_sel_e |
cs |
CS 引脚 |
liot_spi_clk_delay_e |
clk_delay |
MISO 延时采样 |
liot_spi_device_mode_e |
device_mode |
主从模式以及主从单线模式选择 |
liot_spi_data_msb_lsb_e |
data_msb_lsb |
msb first or lsb first |
liot_spi_irq_callback |
irq_callback |
spi传输完成回调函数 |
3.3 liot_spi_input_mode_e
SPI 输入功能枚举定义如下:
定义
typedef enum{
LIOT_SPI_INPUT_FALSE, // SPI不允许输入(读取)
LIOT_SPI_INPUT_TRUE, // SPI允许输入(读取)
} liot_spi_input_mode_e;
参数
LIOT_SPI_INPUT_FALSE:禁用 SPI 输入(读取)功能。LIOT_SPI_INPUT_TRUE:启用 SPI 输入(读取)功能。
3.4 liot_spi_port_e
SPI 总线编号枚举定义如下:
定义
typedef enum{
LIOT_SPI_PORT0, // SPI0总线
LIOT_SPI_PORT1, // SPI1总线
} liot_spi_port_e;
参数
LIOT_SPI_PORT0:SPI0 总线。LIOT_SPI_PORT1:SPI1 总线。
3.5 liot_spi_clk_e
SPI 时钟频率枚举定义如下:
定义
typedef enum{
LIOT_SPI_CLK_INVALID = -1, //无效时钟选择
LIOT_SPI_CLK_812_5KHZ = 812500, //时钟:812.5K
LIOT_SPI_CLK_1_625MHZ = 1625000, //时钟:1.625M
LIOT_SPI_CLK_3_25MHZ = 3250000, //时钟:3.125M
LIOT_SPI_CLK_6_5MHZ = 6500000, //时钟:6.5M
LIOT_SPI_CLK_13MHZ = 13000000, //时钟:13M
} liot_spi_clk_e;
参数
LIOT_SPI_CLK_INVALID:无效参数。LIOT_SPI_CLK_812_5KHZ:时钟频率为 812.5 kHz。LIOT_SPI_CLK_1_625MHZ:时钟频率为 1.625 MHz。LIOT_SPI_CLK_3_25MHZ:时钟频率为 3.25 MHz。LIOT_SPI_CLK_6_5MHZ:时钟频率为 6.5 MHz。LIOT_SPI_CLK_13MHZ:时钟频率为 13 MHz。
注意:这几个枚举值只是几个常用的时钟频率,其他的也支持,直接配置对应的数值就可以,比如10k(10000)、80k(80000)等等。
3.6 liot_spi_cs_pol_e
CS 引脚电平枚举定义如下:
声明
typedef enum{
LIOT_SPI_CS_ACTIVE_HIGH, // SPI总线操作时,CS脚为高
LIOT_SPI_CS_ACTIVE_LOW, // SPI总线操作时,CS脚为低
} liot_spi_cs_pol_e;
参数
LIOT_SPI_CS_ACTIVE_HIGH:SPI 总线操作时,CS 脚为高。
LIOT_SPI_CS_ACTIVE_LOW:SPI 总线操作时,CS 脚为低。
3.7 liot_spi_cpol_pol_e
时钟极性枚举定义如下:
声明
typedef enum{
LIOT_SPI_CPOL_LOW = 0, // SPI未使能时,CLK线为低电平,第一个边沿是上升沿
LIOT_SPI_CPOL_HIGH, // SPI未使能时,CLK线为高电平,第一个边沿是下降沿
} liot_spi_cpol_pol_e;
参数
LIOT_SPI_CPOL_LOW :SPI 未使能时,CLK 线为低电平,第一个边沿是上升沿。
LIOT_SPI_CPOL_HIGH:SPI 未使能时,CLK 线为高电平,第一个边沿是下降沿。
3.8 liot_spi_cpha_pol_e
时钟相位枚举定义如下:
声明
typedef enum{
LIOT_SPI_CPHA_1Edge, // 在第一个边沿采样
LIOT_SPI_CPHA_2Edge, //在第二个边沿采样
} liot_spi_cpha_pol_e;
参数
LIOT_SPI_CPHA_1Edge:数据采样从第一个时钟边沿开始。
LIOT_SPI_CPHA_2Edge:数据采样从第二个时钟边沿开始。
3.9 liot_spi_input_sel_e
数据输入引脚枚举定义如下:
声明
typedef enum{
LIOT_SPI_DI_0 = 0, //选择DI0为数据输入引脚,not use now
LIOT_SPI_DI_1, //选择DI1为数据输入引脚
LIOT_SPI_DI_2, //选择DI2为数据输入引脚,not use now
} liot_spi_input_sel_e;
参数
LIOT_SPI_DI_0 :DI0 为数据输入引脚(暂不支持)
LIOT_SPI_DI_1:DI1 为数据输入引脚
LIOT_SPI_DI_2:DI2 为数据输入引脚(暂不支持)
注意:MISO引脚目前不支持配置,使用默认DI1就可以。
3.10 liot_spi_transfer_mode_e
SPI 传输模式枚举定义如下:
声明
typedef enum{
LIOT_SPI_DIRECT_POLLING = 0, // FIFO读写,轮询等待
LIOT_SPI_DIRECT_IRQ, // FIFO读写,中断通知
LIOT_SPI_DMA_IRQ, // DMA读写, 中断通知
} liot_spi_transfer_mode_e;
参数
LIOT_SPI_DIRECT_POLLING :FIFO 读写,轮询等待。
LIOT_SPI_DIRECT_IRQ:FIFO 读写,中断通知。
LIOT_SPI_DMA_IRQ:DMA 读写, 中断通知。
3.11 liot_spi_cs_sel_e
CS 引脚枚举定义如下:
声明
typedef enum{
LIOT_SPI_CS0 = 0, //选择cs0为SPI片选CS引脚
LIOT_SPI_CS1, //选择cs1为SPI片选CS引脚
LIOT_SPI_CS2, //选择cs2为SPI片选CS引脚,not use now
LIOT_SPI_CS3, //选择cs3为SPI片选CS引脚,not use now
} liot_spi_cs_sel_e;
参数
LIOT_SPI_CS0 :CS0 为 SPI 的 CS 引脚。
LIOT_SPI_CS1:CS1 为 SPI 的 CS 引脚。
LIOT_SPI_CS2:CS2 为 SPI 的 CS 引脚(暂不支持)。
LIOT_SPI_CS3:CS3 为 SPI 的 CS 引脚(暂不支持)。
3.12 liot_spi_clk_delay_e
MISO 延时采样枚举定义如下:
声明
typedef enum{
LIOT_SPI_CLK_DELAY_0 = 0, //无delay, 默认状态
LIOT_SPI_CLK_DELAY_1, // MISO delay一个边沿采样
} liot_spi_clk_delay_e;
参数
LIOT_SPI_CLK_DELAY_0 :MISO 无延时采样。
LIOT_SPI_CLK_DELAY_1:MISO 延时一个时钟边沿采样。
3.13 liot_spi_device_mode_e
device mode枚举定义如下:
声明
typedef enum
{
LIOT_SPI_DEVICE_MODE_INVALID = 0,
LIOT_SPI_DEVICE_MODE_MASTER, // SPI master mode, full duplex
LIOT_SPI_DEVICE_MODE_SLAVE, // SPI slave mode, full duplex
LIOT_SPI_DEVICE_MODE_MASTER_SIMPLEX, // SPI master mode, half duplex, shared MOSI for transmit/receive
LIOT_SPI_DEVICE_MODE_SLAVE_SIMPLEX, // SPI slave mode, half duplex, shared MISO for transmit/receive
} liot_spi_device_mode_e;
参数
LIOT_SPI_DEVICE_MODE_INVALID:无效模式
LIOT_SPI_DEVICE_MODE_MASTER:master模式
LIOT_SPI_DEVICE_MODE_SLAVE:slave模式
LIOT_SPI_DEVICE_MODE_MASTER_SIMPLEX:master模式,半双工,共享MOSI收发
LIOT_SPI_DEVICE_MODE_SLAVE_SIMPLEX:slave模式,半双工,共享MISO收发
3.14 liot_spi_data_msb_lsb_e
msb_lsb枚举定义如下:
声明
typedef enum
{
LIOT_SPI_DATA_MSB_LSB = 0, // MSB first
LIOT_SPI_DATA_LSB_MSB, // LSB first
} liot_spi_data_msb_lsb_e;
参数
LIOT_SPI_DATA_MSB_LSB:MSB first
LIOT_SPI_DATA_LSB_MSB:LSB first
3.15 liot_spi_irq_callback
回调类型定义如下:
声明
typedef void (*liot_spi_irq_callback)(uint32_t event);
参数
这是一个函数指针,spi传输完成之后,会在中断中回调这个函数。
4 API 函数详解
4.1 liot_spi_init
该函数用于初始化 SPI,应在使用 SPI 其他 API 前调用。调用该函数前,需通过 liot_pin_set_func(具体参考demo调用)设置指定 GPIO 引脚为 SPI 功能。
其中 liot_spi_config_s 默认配置如下:
struct liot_spi_config_s defaultCfg{
.input_mode = LIOT_SPI_INPUT_TRUE, // 是否使能read功能
.framesize = 8, // 一次传输的bit数
.cs_polarity0 = LIOT_SPI_CS_ACTIVE_LOW, // cs0低电平有效
.cs_polarity1 = LIOT_SPI_CS_ACTIVE_LOW, // cs1低电平有效
.cpol = LIOT_SPI_CPOL_LOW, // spi clk初始电平为低电平
.cpha = LIOT_SPI_CPHA_1Edge, // 在spi clk第一个边沿采样,上升沿
.input_sel = LIOT_SPI_DI_1, // MISO使用默认引脚,不能配置其他
.cs = LIOT_SPI_CS0, // 使用CS0
.clk_delay = LIOT_SPI_CLK_DELAY_0 // 采样不设置延迟
};
声明
liot_errcode_spi_e liot_spi_init(liot_spi_port_e port,
liot_spi_transfer_mode_e transmode,
liot_spi_clk_e spiclk);
参数
port:[In] SPI 总线编号。
transmode:[In] SPI 传输模式。
spiclk:[In] SPI 时钟频率。
返回值
liot_errcode_spi_e:执行结果码,请参考 4.1。
4.2 liot_spi_init_ext
该函数用于初始化 SPI(配置 SPI 总线参数),应在使用 SPI 其他 API 前调用。
该函数可用于选择 SPI 总线、配置 SPI 输入功能、时钟频率、数据帧大小、CS 引脚和引脚电平、时钟极性、时钟相位、数据输入引脚、传输模式及 MISO 延时采样。调用此函数前,需通过 liot_pin_set_func()设置相关 GPIO 引脚为 SPI 功能。
声明
liot_errcode_spi_e liot_spi_init_ext(liot_spi_config_s spi_config);
参数
spi_config:[In] SPI 总线参数配置。
返回值
liot_errcode_spi_e:执行结果码,请参考 4.1。
注意:有两个初始化函数,liot_spi_init和liot_spi_init_ext,这两个区别是liot_spi_init只能配置port、传输模式以及clk;
而liot_spi_init_ext函数通过liot_spi_config_s结构,可以配置spi相关的所有设置。
4.3 liot_spi_write_read
该函数用于设置通过 SPI 同时发送和接收数据(全双工模式,同时发送和接收,必须有发送buf和接收buf)。
声明
liot_errcode_spi_e liot_spi_write_read(liot_spi_port_e port,
unsigned char *inbuf,
unsigned char *outbuf,
unsigned int len);
参数
port:[In] SPI 总线编号。
inbuf:[Out] 接收数据。
outbuf:[In] 发送数据。
len: [In] 发送和接收数据的长度。
返回值
liot_errcode_spi_e:执行结果码,请参考 4.1。
4.4 liot_spi_read
该函数用于设置通过 SPI 接收数据。
声明
liot_errcode_spi_e liot_spi_read(liot_spi_port_e port,
unsigned char *buf,
unsigned int len);
参数
port:[in] SPI 总线编号。
buf:[Out] 接收数据。
len:[In] 接收数据的长度。单位:字节。
返回值
liot_errcode_spi_e:执行结果码,请参考 4.1。
4.5 liot_spi_write
该函数用于设置通过 SPI 发送数据。
声明
liot_errcode_spi_e liot_spi_write(liot_spi_port_e port,
unsigned char *buf,
unsigned int len);
参数
port:[In] SPI 总线编号。
buf:[In] 发送数据。
len:[In] 发送数据的长度。单位:字节。
返回值
liot_errcode_spi_e:执行结果码,请参考 4.1。
4.6 liot_spi_release
该函数用于释放 SPI 总线。
声明
liot_errcode_spi_e liot_spi_release(liot_spi_port_e port);
参数
port:[In] SPI 总线编号。
返回值
liot_errcode_spi_e:执行结果码,请参考 4.1。
5 代码示例
5.1 示例代码参考
LSDK/examples/demo/src/demo_spi.c 文件。
#include "lierda_app_main.h"
#include "liot_gpio2.h"
#include "liot_os.h"
#include "liot_spi.h"
#include <string.h>
// Define SPI pin configurations for different chips
#define LIOT_CUR_SPI0_MOSI_PIN_MUN (85)
#define LIOT_CUR_SPI0_MISO_PIN_MUN (84)
#define LIOT_CUR_SPI0_CLK_PIN_MUN (86)
#define LIOT_CUR_SPI0_CS0_PIN_MUN (83)
#define LIOT_CUR_SPI_PIN_FUNC (1)
/** @brief Switch for testing SPI master mode, 1 for enabled, 0 for disabled */
#define SPI_MASTER_DEMO 0
/** @brief Switch for testing SPI slave mode, 1 for enabled, 0 for disabled */
#define SPI_SLAVE_DEMO 1
/** @brief Clock speed for SPI testing */
#define SPI_DEMO_CLK_SPEED 8000000U
/** @brief Length of test data */
#define TEST_DATA_LEN (128)
/** @brief Test data buffer for writing */
unsigned char demo_data_w[TEST_DATA_LEN] = {0};
/** @brief Test data buffer for reading */
unsigned char demo_data_r[TEST_DATA_LEN] = {0};
/**
* @brief Transfer completion flag in SPI slave mode
*/
uint8_t isTransferDone = 0;
/**
* @brief Interrupt callback function in SPI slave mode
* This function is called when the SPI transfer is completed or an error occurs.
* @param event Event flag indicating the transfer status
*/
void liot_spi_demo_callback(uint32_t event)
{
uint8_t i = 0;
if(event & LIOT_SPI_EVENT_TRANSFER_COMPLETE)
{
isTransferDone = 1;
}
else
{
liot_trace("spi_demo_callback error %d", event);
for(i = 0; i < TEST_DATA_LEN; i++)
{
liot_trace("[%d]Input:0x%x", i, demo_data_r[i]);
}
}
}
/**
* @brief Thread function for SPI master mode testing
* This function initializes the SPI master mode and performs data write and read operations in a loop.
* @param argv Thread parameters
*/
#if SPI_MASTER_DEMO == 1
void liot_spi_demo_thread(void *argv)
{
unsigned char i = 1;
// Configuration structure for SPI settings, used to initialize the SPI master mode.
liot_spi_config_s cfg = {
.input_mode = LIOT_SPI_INPUT_TRUE,
.port = LIOT_SPI_PORT0,
.framesize = 8,
.spiclk = SPI_DEMO_CLK_SPEED,
.cs_polarity0 = LIOT_SPI_CS_ACTIVE_LOW,
.cs_polarity1 = LIOT_SPI_CS_ACTIVE_LOW,
.cpol = LIOT_SPI_CPOL_HIGH,
.cpha = LIOT_SPI_CPHA_2Edge,
.input_sel = LIOT_SPI_DI_1,
.transmode = LIOT_SPI_DIRECT_POLLING,
.cs = LIOT_SPI_CS0,
.clk_delay = LIOT_SPI_CLK_DELAY_0,
.device_mode = LIOT_SPI_DEVICE_MODE_MASTER,
.data_msb_lsb = LIOT_SPI_DATA_MSB_LSB,
.irq_callback = NULL,
};
Liot_SetPinFunc(LIOT_CUR_SPI0_MOSI_PIN_MUN, LIOT_CUR_SPI_PIN_FUNC);
Liot_SetPinFunc(LIOT_CUR_SPI0_MISO_PIN_MUN, LIOT_CUR_SPI_PIN_FUNC);
Liot_SetPinFunc(LIOT_CUR_SPI0_CLK_PIN_MUN, LIOT_CUR_SPI_PIN_FUNC);
liot_spi_init_ext(cfg);
while (1)
{
liot_rtos_task_sleep_ms(5000);
liot_trace("spi demo master running...");
memset(demo_data_w, i++, TEST_DATA_LEN);
memset(demo_data_r, 0, TEST_DATA_LEN);
liot_spi_write_read(LIOT_SPI_PORT0, demo_data_r, demo_data_w, TEST_DATA_LEN);
liot_trace("Output:0x%x,0x%x,0x%x", demo_data_w[0], demo_data_w[TEST_DATA_LEN/2], demo_data_w[TEST_DATA_LEN-1]);
liot_trace("Input :0x%x,0x%x,0x%x", demo_data_r[0], demo_data_r[TEST_DATA_LEN/2], demo_data_r[TEST_DATA_LEN-1]);
}
liot_rtos_task_delete(NULL);
}
#elif SPI_SLAVE_DEMO == 1
/**
* @brief Thread function for SPI slave mode testing
* This function initializes the SPI slave mode and performs data read and write operations in a loop,
* waiting for the transfer to complete.
*
* @param argv Thread parameters
*/
void liot_spi_demo_thread(void *argv)
{
unsigned char i = 1;
uint32_t timeOut_ms = 5000;
// Configuration structure for SPI settings, used to initialize the SPI slave mode.
liot_spi_config_s cfg = {
.input_mode = LIOT_SPI_INPUT_TRUE,
.port = LIOT_SPI_PORT0,
.framesize = 8,
.spiclk = SPI_DEMO_CLK_SPEED,
.cs_polarity0 = LIOT_SPI_CS_ACTIVE_LOW,
.cs_polarity1 = LIOT_SPI_CS_ACTIVE_LOW,
.cpol = LIOT_SPI_CPOL_HIGH,
.cpha = LIOT_SPI_CPHA_2Edge,
.input_sel = LIOT_SPI_DI_1,
.transmode = LIOT_SPI_DMA_IRQ,
.cs = LIOT_SPI_CS0,
.clk_delay = LIOT_SPI_CLK_DELAY_0,
.device_mode = LIOT_SPI_DEVICE_MODE_SLAVE,
.data_msb_lsb = LIOT_SPI_DATA_MSB_LSB,
.irq_callback = liot_spi_demo_callback,
};
Liot_SetPinFunc(LIOT_CUR_SPI0_MOSI_PIN_MUN, LIOT_CUR_SPI_PIN_FUNC);
Liot_SetPinFunc(LIOT_CUR_SPI0_MISO_PIN_MUN, LIOT_CUR_SPI_PIN_FUNC);
Liot_SetPinFunc(LIOT_CUR_SPI0_CLK_PIN_MUN, LIOT_CUR_SPI_PIN_FUNC);
Liot_SetPinFunc(LIOT_CUR_SPI0_CS0_PIN_MUN, LIOT_CUR_SPI_PIN_FUNC);
liot_spi_init_ext(cfg);
while (1)
{
liot_trace("spi demo slave running...");
memset(demo_data_w, i++, TEST_DATA_LEN);
memset(demo_data_r, 0, TEST_DATA_LEN);
timeOut_ms = 5000;
liot_spi_write_read(LIOT_SPI_PORT0, demo_data_r, demo_data_w, TEST_DATA_LEN);
do {
liot_rtos_task_sleep_ms(1);
} while ((isTransferDone == false) && --timeOut_ms);
if(timeOut_ms == 0)
liot_trace("Slave receive failed for timeout\n");
liot_trace("Output:0x%x,0x%x,0x%x", demo_data_w[0], demo_data_w[TEST_DATA_LEN/2], demo_data_w[TEST_DATA_LEN-1]);
liot_trace("Input :0x%x,0x%x,0x%x", demo_data_r[0], demo_data_r[TEST_DATA_LEN/2], demo_data_r[TEST_DATA_LEN-1]);
}
liot_rtos_task_delete(NULL);
}
#endif
示例代码有master和slave两种测试模式,根据需要选择。我们打开#define SPI_MASTER_DEMO宏,使用主模式测试。
短接模组MISO和MOSI,使用逻辑分析仪及日志工具抓取波形与日志,运行结果如下:

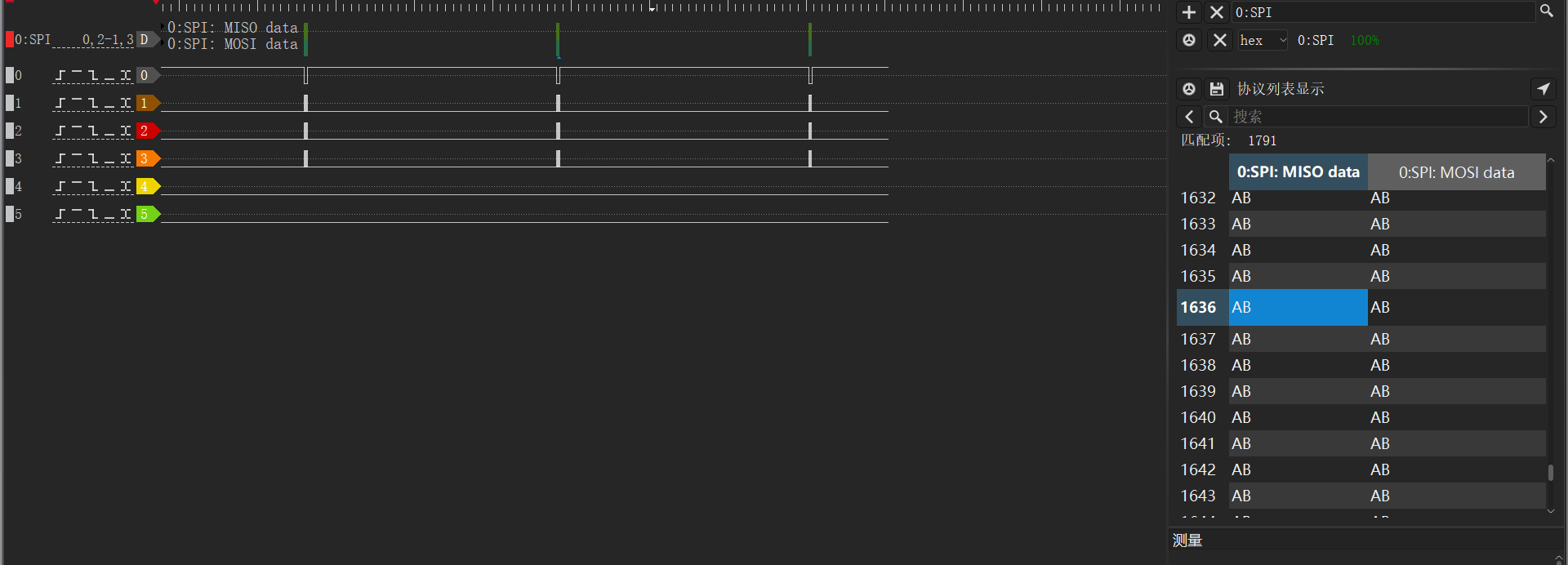
如上图所示,日志打印数据0xab与MOSI、MISO输出一致,表明 SPI 通讯成功。
6 常见问题
6.1 EC718 的 CSPI 帧结构遵循的是哪家的协议?
MTK 的协议。
6.2 SPI 支持 MSB 还是 LSB?
只支持 MSB。